
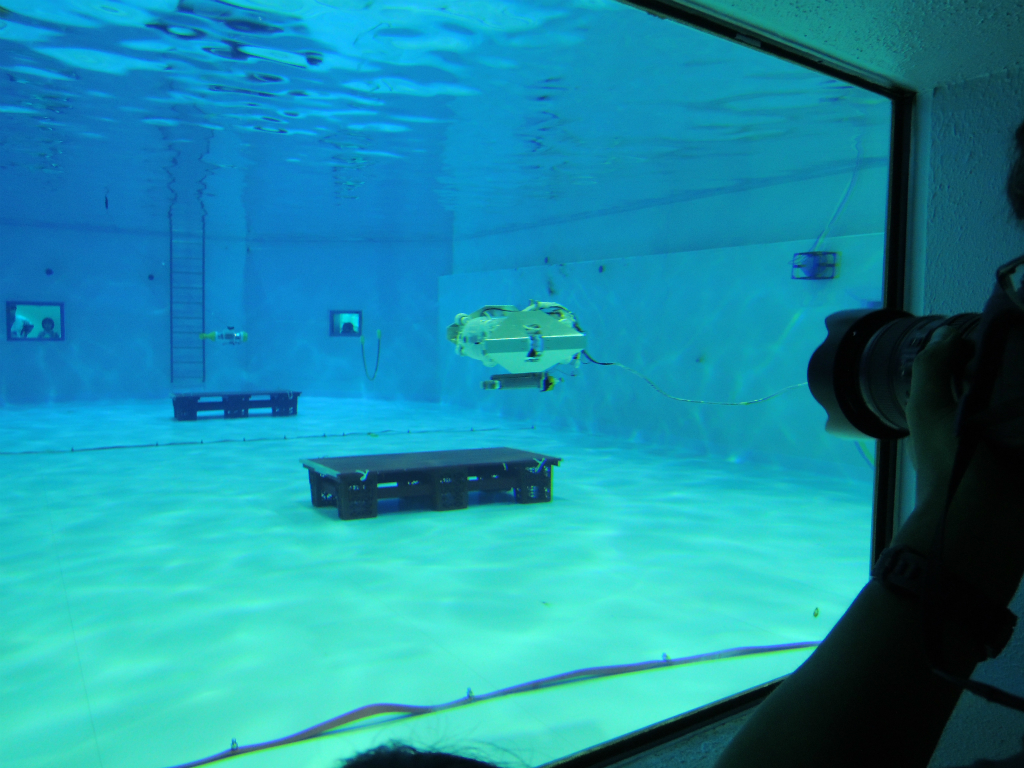
夏休みの終わりの先週末、「水中ロボコンin JAMSTEC’13」(公式サイト)というのに見学に行ってきました。
JAMSTECのプールに集まって、プールの中で水中ロボットを動かして競技をするという会です。
競技は、一般競技と高校競技に分かれています、それから、デモと言って競技ではなく、ロボットを水中で泳がせつつ、ロボットの特徴をプレゼンするという種目もありました。
競技の方は、ROV部門(ひも付きの外部操作をするロボット)とAUV部門(ロボット自体が判断をして決められたコースを泳ぐ)に分かれていて、大学(院)生のグループやおっさんが出場していました。
私は、見学だけの気楽な身分で参加。
土曜日は、プールでロボットの調整をしたあと、ワークショップと言って、それぞれロボットの特徴などをプレゼンする会議が開かれていました。こちらは、個人的には面白くみられました。もう少し、質疑が活発だといいと思うのですが、みんなシャイなのかな。
日曜日は、競技とデモ。
デモの方は、ペンギンの形を模したロボットや、イルカの動きを模したロボットなどあり、なかなか面白かったです(うまく動いていなかったのも多かったけれど)。
正直なところ、競技の方は、なかなか内容が難しいのか、最後まで競技をコンプリートできたグループはそんなに多くなかったです(というかほとんどいなかった)。
ROVの部門の方は、デザインに問題があるためか、ロボットが思うような方向に動かせなくて苦労しているグループが多かったし、AUV部門の方は、ほとんどのグループが、水中のターゲット(これにタッチするとポイント)をうまく見つけられていないようでした。
これはだめだ、となったら、プールで待機しているダイバーが助けに出動して、ROV, AUVをスタート地点に戻してくれるのですが、頻繁にダイバーヘルプが発動してしまって、途中から、ダイバーエキシビションみたいになってました。
参加しているグループの人は必死で調整しているのだと思いますが、もう少し開発段階から水の中で練習する機会があるといいのかな、などと外野はみながら思っていました。
主催の方とお話をする機会があったのですが、多くのグループが1年程度の活動で1個のロボットを仕上げてくるので、なかなかknowledge、技術の世代間の継承に苦労しているとのことでした。
考え方を変えて、ロボットに使う部品などをある程度実績のあるものをロボコンの事務局の方で選んで共通に決めて、その部品の使い方の工夫で優劣がでるようなルールにするなどしてもいいのかも、なんて勝手に思っていました。
また、自分が水中ロボットを作って遊ぶのなら、どんな機軸のものを作ったら面白いだろう?なんて思いながら見ていました。いずれにしても、いろいろなグループが苦労しながら品物を仕上げる様子が見られて楽しい週末でした。
3040Z-SにUSBカメラをつける(2)
アルミテーブルを切削してしまうという痛恨のミスはありましたが、なんとか、USBカメラのアタッチメントの8mm径の穴あけができました。
切削はZ軸のフィードはおっかなびっくりの100mm/min にしましたが、X,Y方向へのフィードは300mm/minに設定してみました。Z軸方向の1回の切り込みは1mm程度にしましたので、3mmのLアングルを切削するには3回切削が繰り返されます。
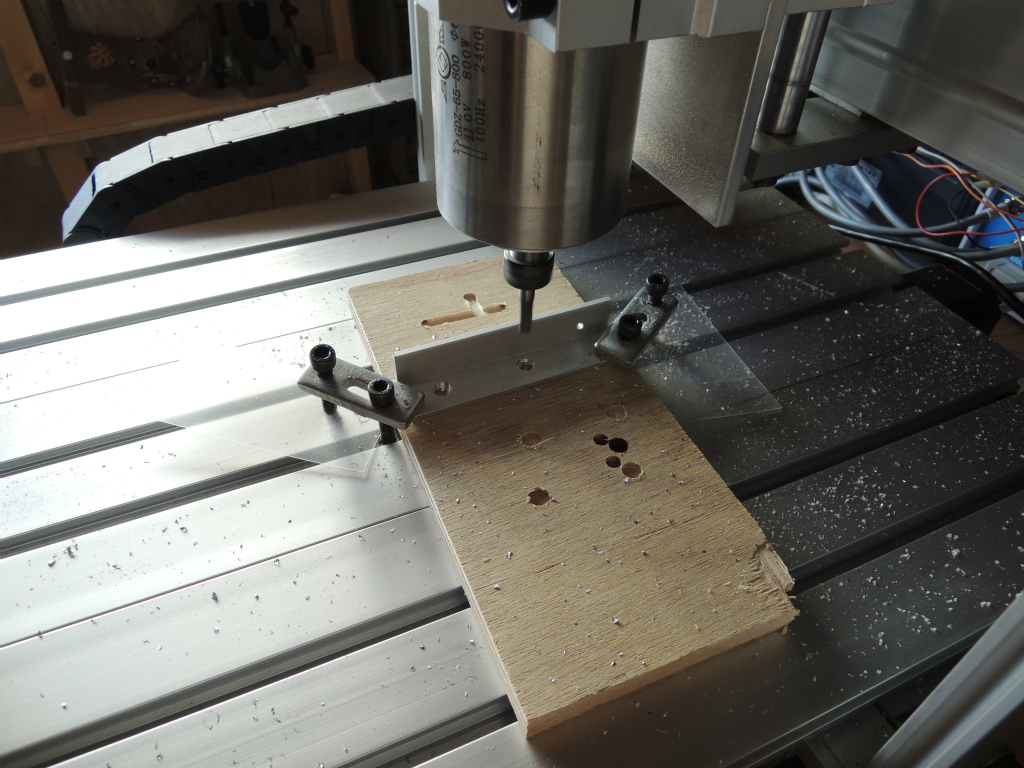
切った様子を見たところ心配していたフィードは問題なし。
ただ、位置決めが難しいですね。アングルを試しに機械につけてみたら、少し傾いているので、修正が必要です。それに、位置が不適切で、平らにつかないことも後から判明。もうちょっと調べてから作れよ、って自分に突っ込みを入れたくなりました。
USBカメラも、おさがりのUSBカメラがwindows7に対応していなくてショックだったので、今度はちゃんと確かめてwindows7対応のものを購入してみました。店でワゴンセールになって、ほこりをかぶっていた1個798円のUSBカメラ。なぜに激安に走るのか・・・また、写らなかったりして苦労したりして。
200万画素って書いてあるけど、こういう目的に画素数とか大して関係ないと思いますので、テキトー。
位置決めは、USBカメラがついたら画面を見て座標変換をすれば済むので、今は苦労しているけどあまり深く考えないことにしています。
3040Z-SにUSBカメラをつける(1)
ゆっくりと3040Z-Sをいじくって遊んでいます。
planet CNC コントロールソフトに、USBカメラで位置合わせをするという機能があり、これ、結構簡単そうと思いましたので、試してみることにしました。
USBカメラは、妻のおさがり(だいぶ古い)のElecomのもの。本体にネジ穴がありましたので、スピンドルを留めている金具にアルミのL金具を取り付け、そこにネジ止めしてやろうと思います。
L金具を切り出しましたが、スピンドルの留めネジがM8なので、8mmの穴をあける必要があります。
そういえば、8mmのドリルなんて持ってなかった。–> あ、そうだ、CNCで8mmの穴を切削しよう。
CNCマシンの部品をCNCで作る。これだよ。って感じです。
(今思うとこれが間違いの始まりだったような)
手持ちの6mm のエンドミルで8mmの穴をあけるには、直径2mmの穴の円周上をエンドミルを動かして切削すればOKのはず。
ということで、JW_CADで2mmの穴の図面を書き、NCVCでそれを読み込んで、Gコードを出力。planetCNCでそのGコードを読み込むといいと思ったのですが、planetCNCでそのままGコードを読み込めない(?)ようなので、テキストエディタでGコードのファイルを開いて、コピー&ペーストでplanetCNCに用意しました。
ここで、大チョンボ。
Z軸の設定を間違い、機械(3040)の台座に孔をあけちゃいました(涙)。
台座には、12mmのべニア板で万が一ミスしても、大丈夫なようにしていたつもりでしたが、やってしまった。
この時は、試行錯誤しながらだったので、機械のソフトリミットも解除していた。
Gコード読み込んだ段階で横から見た図で刃物の現在位置を確認すれば間違えなかったのですが、これをさぼりました。ソフトの使い方にも慣れていないので、ミスした。
さらに、つけようと思ったUSBカメラを試しにPCに挿してみたら、ドライバーがインストールできず。ELECOMのサイトでドライバを検索すると、古すぎて、windows7に対応してません。。。
激安1000円のUSBカメラどっかで買ってこないとなあ。
うーむ。今日は空回りでした。
(なので、写真もなし)。